

MR-J4-60A Bộ điều khiển động cơ Servo Driver Mitsubishi 0.6 kW 3 Pha 220 VAC:
- Model: Bộ điều khiển động cơ Servo Mitsubishi Servo Driver MR-J4-60A
- Công suất: 0.6 kW
- Điện áp: 3 Pha hoặc 1 Pha 200 VAC tới 240 VAC, 50/60 Hz
- Sử dụng cho các loại động cơ Servo dòng: HG-KR, HG-MR, HG-SR, HG-JR, HG-AK, HG-RR, HG-UR
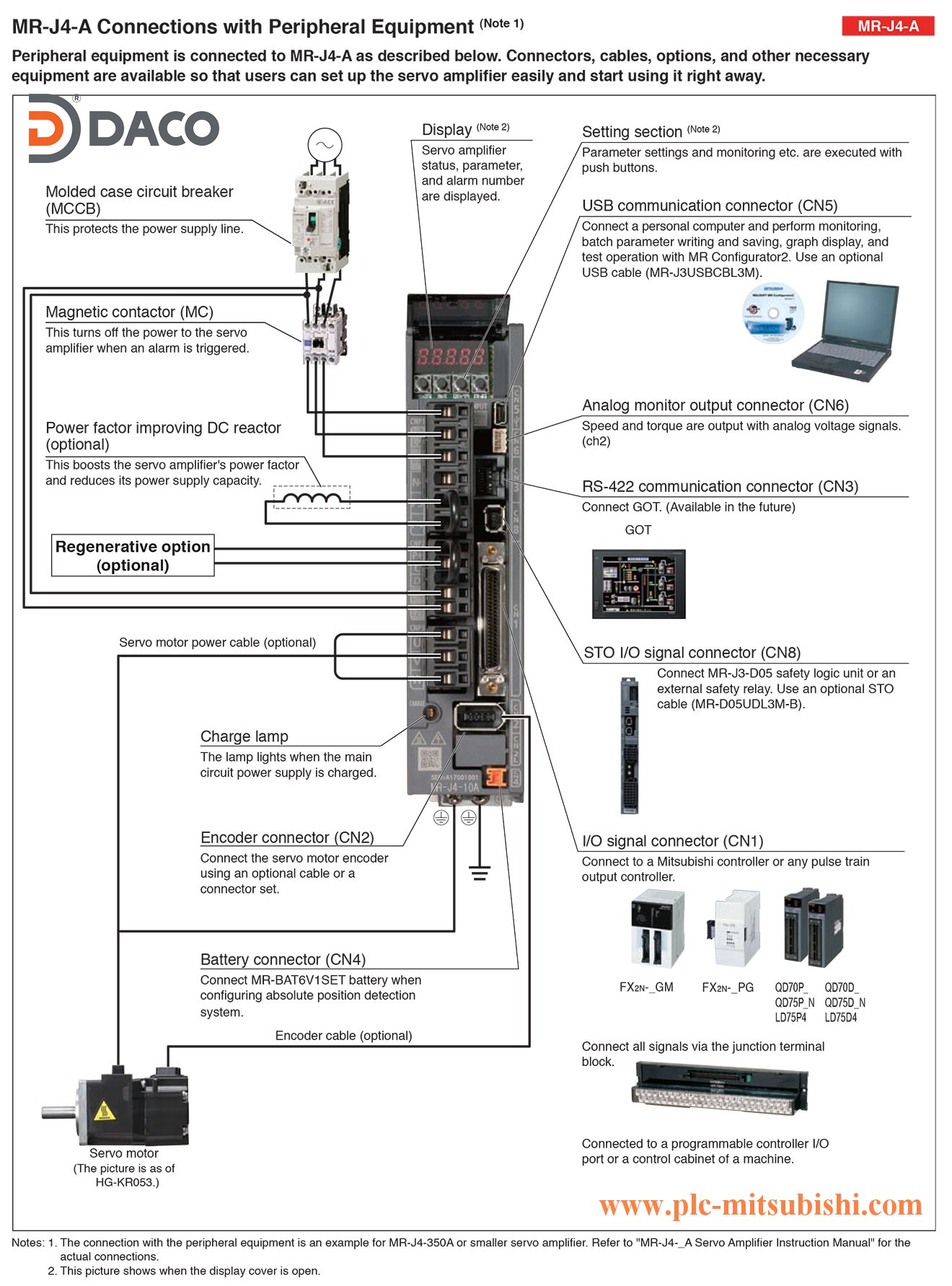
MR-J4-A Connections with Peripheral Equipment Bo dieu khien dong co Servo Driver Mitsubishi
| Servo amplifier model MR-J4- | 10A | 20A | 40A | 60A | 70A | |
| Output | Rated voltage | 3-phase 170 V AC | ||||
| Rated current [A] | 1.1 | 1.5 | 2.8 | 3.2 | 5.8 | |
| Main circuit power supply | Voltage/frequency (Note 1) | 3-phase or 1-phase 200 V AC to 240 V AC, 50/60 Hz | ||||
| Rated current [A] | 0.9 | 1.5 | 2.6 | 3.2 (Note 8) | 3.8 | |
| Permissible voltage fluctuation | 3-phase or 1-phase 170 V AC to 264 V AC | |||||
| Permissible frequency fluctuation | ±5% maximum | |||||
| Control circuit power supply | Voltage/frequency | 1-phase 200 V AC to 240 V AC, 50/60 Hz | ||||
| Rated current [A] | 0.2 | |||||
| Permissible voltage fluctuation | 1-phase 170 V AC to 264 V AC | |||||
| Permissible frequency fluctuation | ±5% maximum | |||||
| Power consumption [W] | 30 | |||||
| Interface power supply | 24 V DC ± 10% (required current capacity: 0.5 A (including CN8 connector signal)) | |||||
| Load-side encoder interface (Note 9) | Mitsubishi high-speed serial communication | |||||
| Tolerable regenerative power of the built-in regenerative resistor (Note 2, 3) [W] |
– | 10 | 10 | 10 | 20 | |
| Control method | Sine-wave PWM control/current control method | |||||
| Dynamic brake | Built-in (Note 4) | |||||
| Protective functions | Overcurrent shut-off, regenerative overvoltage shut-off, overload shut-off (electronic thermal), servo motor overheat protection, encoder error protection, regenerative error protection, undervoltage protection, instantaneous power failure protection, overspeed protection, error excessive protection | |||||
| Position control mode | Maximum input pulse frequency | 4 Mpps (when using differential receiver), 200 kpps (when using open-collector) | ||||
| Positioning feedback pulse | Encoder resolution: 22 bits | |||||
| Command pulse multiplying factor | Electronic gear A/B multiple, A: 1 to 16777216, B: 1 to 16777216, 1/10 < A/B < 4000 | |||||
| Positioning complete width setting | 0 pulse to ±65535 pulses (command pulse unit) | |||||
| Error excessive | ±3 rotations | |||||
| Torque limit | Set by parameters or external analog input (0 V DC to +10 V DC/maximum torque) | |||||
| Speed control mode | Speed control range | Analog speed command 1:2000, internal speed command 1:5000 | ||||
| Analog speed command input | 0 V DC to ±10 V DC/rated speed (Speed at 10 V is changeable with [Pr. PC12].) | |||||
| Speed fluctuation rate | ±0.01% maximum (load fluctuation 0% to 100%), 0% (power fluctuation: ±10%) ±0.2% maximum (ambient temperature: 25 °C ± 10 °C) only when using analog speed command |
|||||
| Torque limit | Set by parameters or external analog input (0 V DC to +10 V DC/maximum torque) | |||||
| Torque control mode | Analog torque command input | 0 V DC to ±8 V DC/maximum torque (input impedance: 10 kΩ to 12 kΩ) | ||||
| Speed limit | Set by parameters or external analog input (0 V DC to ± 10 V DC/rated speed) | |||||
| Fully closed loop control | Available in the future | |||||
| Safety function (Note 10) | STO (IEC/EN 61800-5-2) | |||||
| Safety performance | Standards certified by CB | EN ISO 13849-1 Category 3 PL d, EN 61508 SIL 2, EN 62061 SIL CL 2, EN 61800-5-2 SIL 2 | ||||
| Response performance | 8 ms or less (STO input OFF → energy shut-off) | |||||
| Test pulse input (STO) (Note 7) | Test pulse frequency: 1 Hz to 25 Hz, Test pulse off time: 1 ms maximum | |||||
| Mean time to dangerous failure (MTTFd) | 100 years | |||||
| Average diagnostic coverage (DCavg) | 90% | |||||
| Probability of dangerous Failure per Hour (PFH) |
1.01 × 10-7 [1/h] | |||||
| Compliance to standards |
CE marking | LVD: EN 61800-5-1, EMC: EN 61800-3, MD: EN ISO 13849-1, EN 61800-5-2, EN 62061 | ||||
| UL standard | UL 508C | |||||
| Communication function | USB: Connect a personal computer (MR Configurator2 compatible) | |||||
| RS-422: 1 : n communication (up to 32 axes) (Available in the future) | ||||||
| Structure (IP rating) | Natural cooling, open (IP20) | Force cooling, open (IP20) | ||||
| Close mounting | Possible (Note 6) | |||||
| Mass [kg] | 0.8 | 0.8 | 1 | 1 | 1.4 | |

